|
|
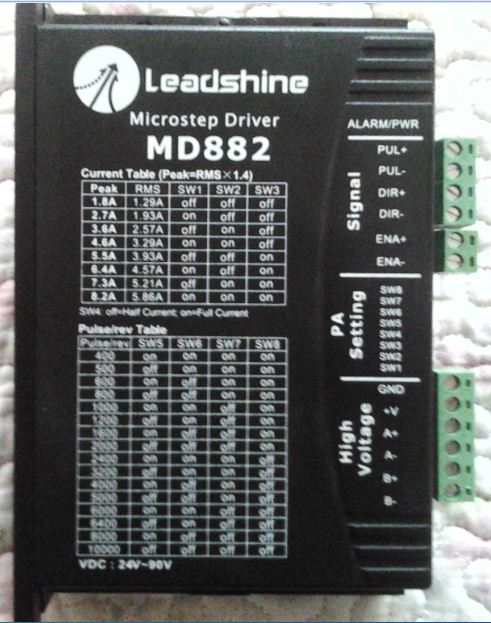
| ��ӦMD882�������������Ƽ�MD882�����������۸�̻����������� |
|
|
|
||||||||||||||||
| ����������������չʾ����Ϣ�ɻ�Ա�����ṩ�����ݵ���ʵ�ԡ�ȷ�ԺͺϷ����ɷ�����Ա����www.qy6.com.cn�Դ˲��е��κ����Ρ������ַ�����Ȩ�棬������֪ͨɾ���� |
| �ù�˾������ҵ��Ϣ |
|
| ��е ���� ��� ���� �繤 ���� ��Ħ ���� ��װ ӡˢ ���� ���� ���� ��ϸ���� ������ ��֯ ұ�� ũҵ �������� ���� ��Դ ��װ ����Ʒ �Ҿ���Ʒ ���� ���õ��� ͨѶ��Ʒ �칫 �˶������� ʳƷ ��� ���� ��� չ�� |
| 1 2 3 4 5 6 7 8 9 10 .. | ��ϵ�ˣ���ΰҵ �绰��15966621448 |
|